当ブログにおいて、初めて地球の自転がファラデーの単極誘導モーターとして起きている可能性を示したのは、2013年5月10日の地球の自転はなぜ維持されるのか(地球は単極モーターである。)という記事でした。 この頃は単極誘導モーターの実験により同軸反転型単極誘導モーターを作っていませんでしたので、考察を進めることができませんでした。 その後の関連記事を揚げますと
ジェット気流と単極誘導モーターの類似性 2015年5月28日、地球は単極誘導モーターに似ている 2016年8月22日、地球は同軸反転型の単極誘導モーターか? 2016年11月14日 があります。
その後、水銀を用いた同軸反転型の単極誘導モーターの追加実験を含めてまとめた記事を同軸反転型単極誘導モーターによる「反作用のない回転運動」実現の可能性について(動画)2017年2月2日に記しました。 それで金属リングを用いることによって、反作用を相殺する単極誘導モーターが実現できそうなことに気付きました。
.
動画1 続きを読む
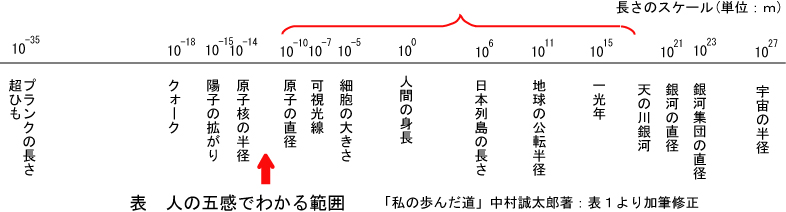 表1
表1 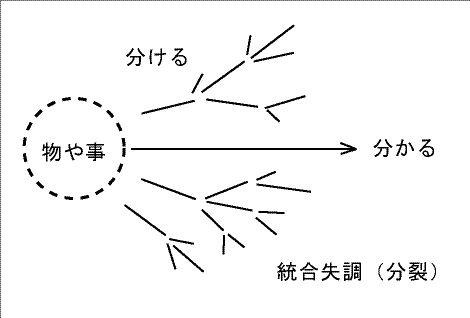 図1
図1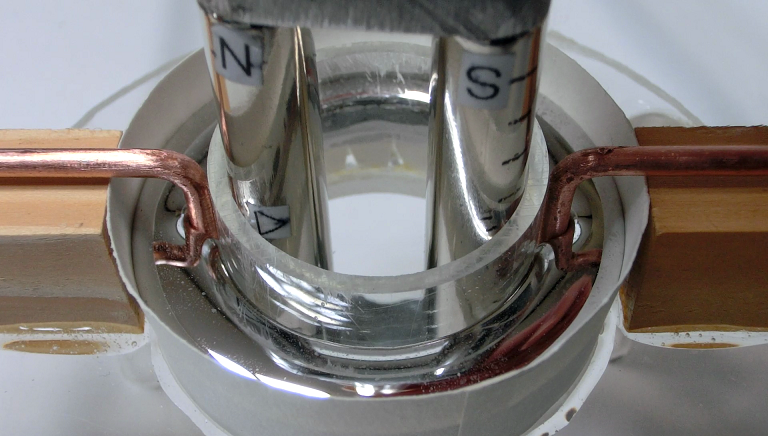 写真1
写真1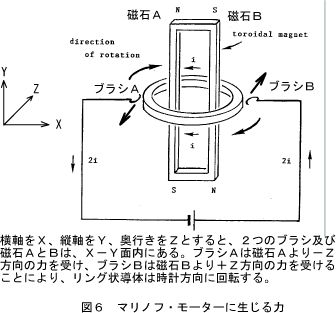 図1
図1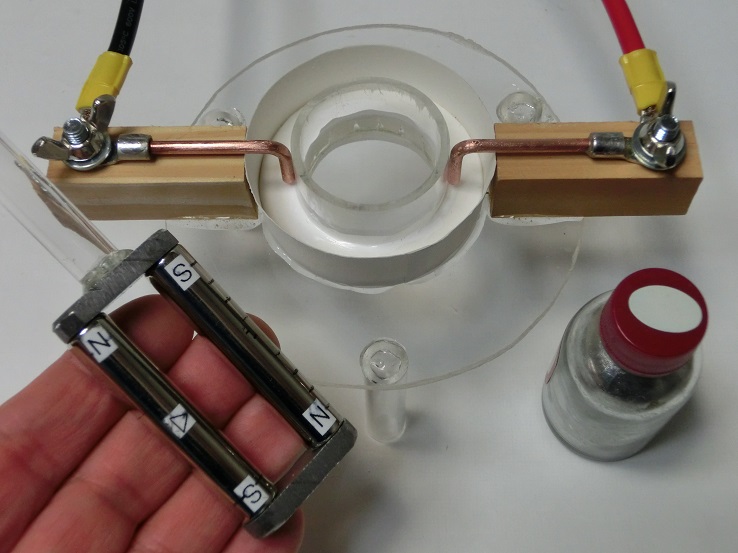 写真1
写真1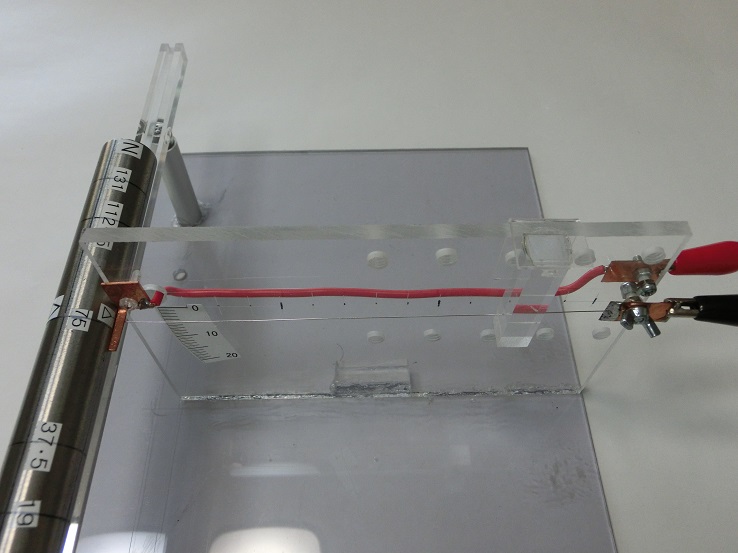 写真1
写真1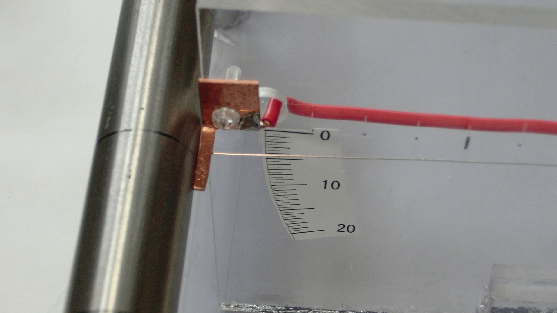 写真2
写真2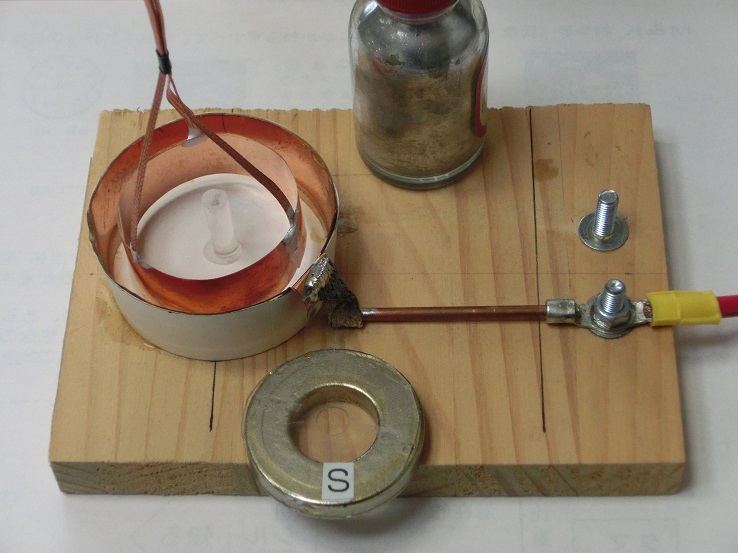 写真1
写真1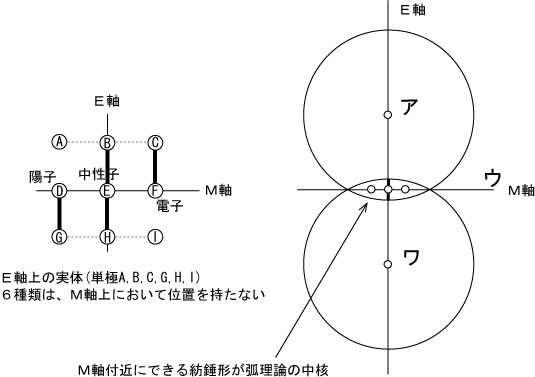 図1 右
図1 右