
昨年2月から単極誘導に関する一連の実験を始めてから、動画サイトに20本あまりの動画を作成投稿しました。いただいたコメントに十分お答えできなかったので、こちらに記します。 管理人は電磁気学を学ばれた方々が一連の実験を見て、どのようにお考えなのかよく理解できません。勉強されるときは、公式から入って理解を深めるのが一般的だと思います。 管理人は、公式は頭の片隅において、実験の経験でわかった方を優先します。ですから、独りよがりな片寄った考えに陥っているという自覚はあります。コメントをいただくことによって軌道修正できることはありがたいことで感謝しています。 ここでは、管理人が得た結論の一つについて説明します。
実験結果から得た結論、 1.単極誘導モーターに生じる力は「磁力線あるいは磁束密度に関係しない」について。
単極誘導の起電力は 式1
![]() によるとされます。ここで、起電力はV、磁束密度はB、速度はv、半径をL。 Sは、Lを縁とする曲面です。 (注:過去の記事に用いた式1の表記が間違っていました。上記に訂正させていただきます。) 電磁誘導 や ファラデーの円板を参照ください。
によるとされます。ここで、起電力はV、磁束密度はB、速度はv、半径をL。 Sは、Lを縁とする曲面です。 (注:過去の記事に用いた式1の表記が間違っていました。上記に訂正させていただきます。) 電磁誘導 や ファラデーの円板を参照ください。
 図1
図1
単極誘導は、軸対称な磁場の同軸上に回転する導体円板の回転軸と外縁に起電力が生じるものです。導体円板は、軸対称な磁場中を運動するので、磁場の強さ磁束密度Bは時間的に変化しません。ですから、式1の右辺第1項はゼロです。右辺第2項は、速度vと磁束密度Bの外積を、閉じた経路Lで線積分します。(注:この解釈でよいのかな?) この右辺第2項が左辺の単極誘導の起電力Vになります。
一般に発電機に電流を流すとモーターになるといわれます。
(1) 単極誘導モーターの一種 実験8 (動画1)
について、式1を適用した場合について考えます。(注:管理人が考えた式1の解釈を実験8に適用したものです。)
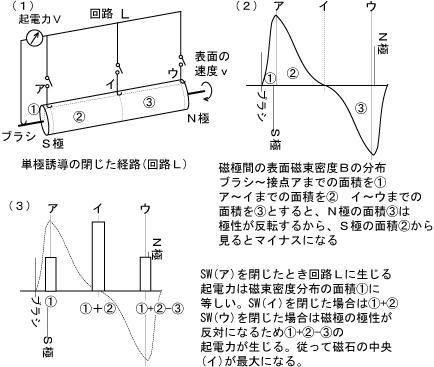 図2
図2
図2(1)は実験8を発電機とした場合を示します。検流計の位置に電源をつなげばモーターになります。 軸対称な磁場を持つ永久磁石を横方向(向かって左をS極、右側をN極)に配置し、回転軸を取り付けます。ブラシにマイナスをつなぎ、ア・イ・ウのいずれかをプラスに接続しますと、回転軸は画面手前方向に回転します。 磁石の閉じた経路(回路)Lは、ブラシ~検流計(電源)を通って、磁石に設けたア・イ・ウを通り~磁石表面~ブラシへ戻ります。実験8では磁石から回転軸への導通が無いため、やむなく磁石に銅の円筒を被せました。ですから多少の磁力線は銅の円筒を通過します。実験8では、銅の円筒の上からテスラメーターにて磁束密度Bを計測しています。(下記図5)
図2(2)は、横軸を磁石の位置(ア・イ・ウ)とし、縦軸を磁束密度Bとしたグラフです。グラフは動画の中でご紹介した(グラフ1:絶対値)の極性を正しく表示したものです。(S極を+、N極を-にしました。) 式1右辺第2項の経路Lにかかる線積分の値は、図2(2)の面積に比例します。
今、モーターとして考えます。 式1において、電源の電圧を一定とし、(経路Lをアとすると)ブラシ~アまでの面積①により、式1右辺第2項の値が決まるので、速度vが定まります。この場合の速度vは回転軸で支えたモーターの回転トルクになります。このモーターの出力が図2(3)アの縦棒グラフです。 次に(経路Lをイとすると)ブラシ~イまでの面積①+②により、式1右辺第2項の値が決まるので、速度vが定まります。このモーターの出力が図2(3)イの縦棒グラフです。 そして、(経路Lをウとすると)ブラシ~ウまでの面積①+②-③により、式1右辺第2項の値が決まるので、速度vが定まります。このモーターの出力が図2(3)ウの縦棒グラフです。 図2(2)において、面積③は②と極性が逆ですから②を③が減ずるところが、この式の要点です。 結果、図2(3)により、実験8において、式1から予想されるモーターの回転出力は、ア<イ>ウ となります。
実際の
実験8の結果は、  図3
図3
であって、式1と同様の傾向になりました。 普通は、メデタシとなるところですが。
次に 実験4を同じ手法で調べたいと思います。
単極誘導モーターに生じる力の解析 (動画2)
実験4は動画2の途中にあります。
その前に、実験4が単極誘導モーターであることの理解が必要です。 一般に知られている単極誘導モーターは
実験1(動画3)
です。回転する銅板と磁石が一緒に回るモーターで、磁力線が原因で回転すると理解した場合、「どこが、反作用を受けているのか?、磁力線は空間に固定されているのか?」などなど、疑問が出てくる有名な実験です。 電磁誘導のように磁力によって力を受けていると理解すると訳がわからないことになります。
余談ですけれど、磁力線が空間に固定されているか、磁石に?についての見解は、実に様々です。あるサイト(URL失念)では、延々と難しい解説をしていたのを見た記憶があります。
実験1-1 (動画4)
は、何の疑いもなく納得できます。 検索サイトで単極誘導モーター(homopolar motor)関連を調べると上の2つの型が90%を占めます。
管理人が、2013年2月6日最初に行ったのは
実験1-2 (動画5)
でした。反作用をどこが受けているのかを知りたかったからです。勿論、動画5は後日撮ったもので、実際は似たような実験を8種類ほど試しました。(電流の経路をいろいろに変えてみても、スズメッキ線が同様に弾かれることを確認しました。)見ておわかりのように、反作用はブラシであるスズメッキ線が受けています。これが見間違いだと思われる方はありませんよね。 因みに単極誘導モーターに生じる力は接点に生じるという考えを持ったのは、そこからです。
実験1-3 (動画6)
では、 磁石を支えている回転軸を固定するものです。
実験3 (動画7)
で特徴的なのは、モーターの銅板に取り付けた(+)電極がモーターの回転中心を通らなくても弾かれる(単極誘導モーターに力が生じる) ということです。
余談ですけれど、 ということは、単極誘導モーターの近傍にもう一つの回転軸を取り付けたら回転するだろうと考えて
実験2 (動画8)
を試しました。 ずっと後になって、マイケルファラデーが1832年に最初の単極誘導発電機を作ったタイプと同じだとわかりました。
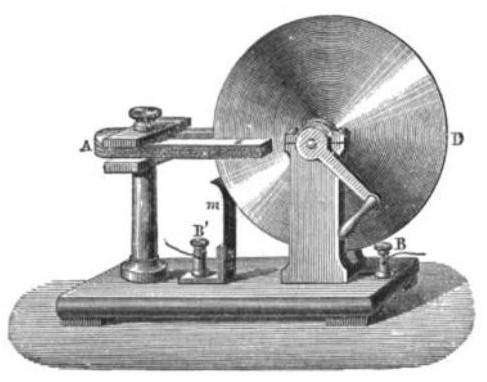 図4
図4ご承知の通り、この装置は、銅円板が磁力線を横切るので、銅板から見ると磁束密度Bが時間的に変化します。ですから、銅円板に渦電流が生じているだろうとわかります。このタイプの発電機・モーターには反トルクが生じるということです。(恥ずかしながら、まだ、ローレンツ力と式1の右辺第1項との関係がよくわかりません。) ただ、管理人は、磁石のN極とS極の中心には磁力線が存在するのかどうかがなかなか理解できませんでした。
テスラメーターで計ると
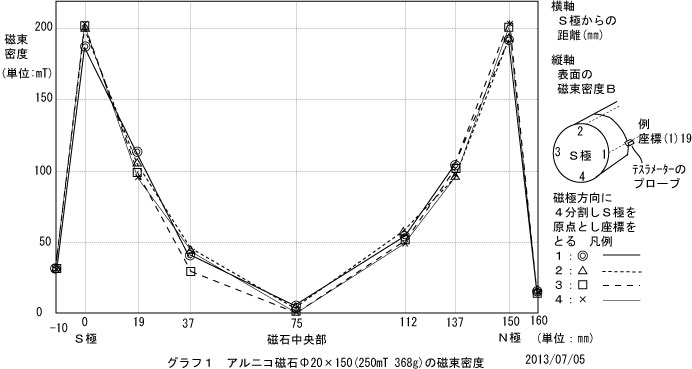 図5
図5中央部に磁束密度がゼロの部分があるのですから不思議です。 とにかく、閉じた経路(回路)Lがどのような形であっても、単極誘導モーターはスズメッキ線を弾くという形で力を生じると理解しました。
長くなりますので次へ続きます。
Follow me!



θ様
先の,磁束のx成分の出し方に誤りがありましたので,下記のように訂正いたします。
テスラメーターで,円柱中心軸と平行なx成分を測る簡易な方法は,テスラメーターを回転軸に垂直な向きに対してθ度傾けて測定し,その値をSINθで割りますとx成分が分かります。
以下,同じです。
熊谷様 わざわざご指導ありがとうございます。メーター先端のホール素子の方向に気を遣っていませんでした。方位磁針での作図方法は、資料を見て存じておりましたが、別のテスラメーターでの作図法(資料失念)を用いました。当方の実験は専門の方から見るといい加減すぎることと理解しています。少しずつ訂正しながら理解を深めていこうと考えています。
YouTubeでも,書かせていただきましたが,図5のデータについてこれを見て誤解する方がいるかもしれないのでもう少し述べます。
テスラメーターアルニコ磁石の磁束密度分布を計測されたとのことですが,テスラメーターの先端のセンサにはホール素子を先端に使用していて指向性が有ります。磁束密度は本来,ベクトルなので,方向を指示しなければならないと思いますが図5に指定しておりません。
図5の元になった実験はアルニコ円柱磁石の側面に,おそらく,垂直にテスラメーターをあてておられたと思います。このときの得られたデータが,y座標成分として描かれているとしますと,x座標の成分が抜けています。
テスラメーターで,円柱中心軸と平行なx成分を測る簡易な方法は,テスラメーターを例えば45度傾けて計測し,その時の値に,ルート2分の1を掛けますとx成分を計測できます。
いずれにしても,xy成分のデータがあれば,磁束密度の強度と向きがきちんと測れると思いますが。